Leonid I. Frantsevich and Holk Cruse
Leg coordination during turning on an extremely narrow substrate
in a bug, Mesocerus marginatus (Heteroptera, Coreidae)
Journal of Insect Physiology 2005, 51: 1092–1104.
Abstract. The turning movement of a bug, Mesocerus
marginatus, is observed when it walks upside-down below a horizontal beam
and, at the end of the beam, performs a sharp turn by 180°. The turn at the
end of the beam is accomplished in three to five steps, without strong temporal
coordination among legs. During the stance, leg endpoints (tarsi) run through
rounded trajectories, rotating to the same side in all legs. During certain phases
of the turn, a leg is strongly depressed and the tarsus crosses the midline. Swing
movements rotate to the same side as do leg endpoints in stance, in strong contrast
to the typical swing movements found in turns or straight walk on a flat surface.
Terminal location is found after the search through a trajectory that first moves
away from the body and then loops back to find substrate. When a leg during stance
has crossed the midline, in the following swing movement the leg may move even
stronger on the contralateral side, i.e. is stronger depressed, in contrast to
swing movements in normal walking, where the leg is elevated. These results suggest
that the animals apply a different control strategy compared to walking and turning
on a flat surface.
(All videos are in AVI format. Left-click on an image to view
in a separate window or right-click and choose "Save File" to download)
Body-fixed coordinate system
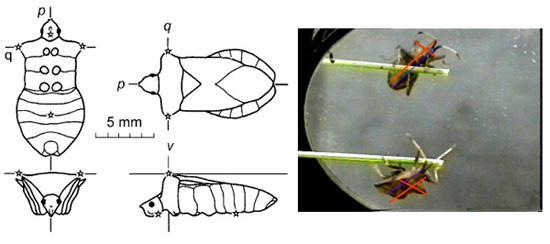
The peculiar body shape of Mesocerus provides good landmarks
for the transverse body-fixed axis q through the acute prothoracical “shoulders”
and for the longitudinal body axis p through the rostral and caudal body
end points. The insect is filmed under a skew mirror: the top image is in the
mirror, the bottom one is real. Frame coordinates of any corresponding points
in two images are transformed into 3D coordinates in the global space. Landmarks
of the body-fixed system are measured in each frame together with leg endpoints.
Then 3D global coordinates of the leg endpoint are transformed into 3D body-fixed
coordinates.

(video)
Leg trajectories

Frame-to-frame leg endpoint coordinates are projected
onto the horizontal bodyfixed plane, viewed from the ventral side. All turns are
shown as turns to the right (video).
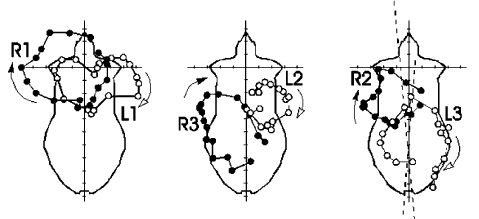
Average stance trajectories of leg endpoints in
ten films are rotations to the same side (clockwise in the figure).
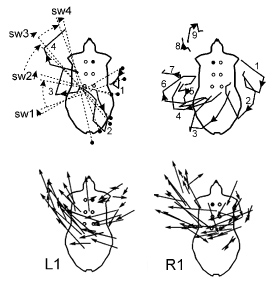
When an insect walks on a level ground, it translates its leg
during the swing approximately to the same body-fixed point where the leg stood
one step ago: there the leg finds the ground. Turning on a twig, the insect would
translate its leg to the empty space. Therefore, swing trajectories have the shape
of loops in search of the ground (top pair of figures, serial steps during one
turn). However, swing vectors from the start point to the finish point form a
vector flow rotating also clockwise (bottom pair of figures, ten films overlaid).
|
|